
An Augmented Catenary Model for Underwater Tethered Robots
Résumé
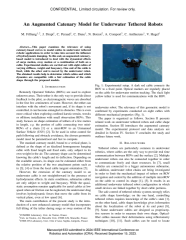
This paper examines the relevance of using catenary-based curves to model cables in underwater tethered robotic applications in order to take into account the influence of hydrodynamic damping. To this end, an augmented catenarybased model is introduced to deal with the dynamical effects of surge motion, sway motion or a combination of both on a cable. Experimental studies are carried out with eight cables of varying stiffness, weight and buoyancy. One end of the cable is fixed, while the other end is moved by the underwater robot. The obtained results help to determine which cables and which dynamics are compatible with a fair estimation of the cable shape through the proposed models.
Domaines
Automatique / Robotique
Fichier principal
 ICRA24_0633_MS (1).pdf (5.77 Mo)
Télécharger le fichier
icra_finale_static_histogram.mp4 (14.87 Mo)
Télécharger le fichier
ICRA24_0633_MS (1).pdf (5.77 Mo)
Télécharger le fichier
icra_finale_static_histogram.mp4 (14.87 Mo)
Télécharger le fichier
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
| Licence |
Copyright (Tous droits réservés)
|
|---|